Control electromagnético
Control electromagnético
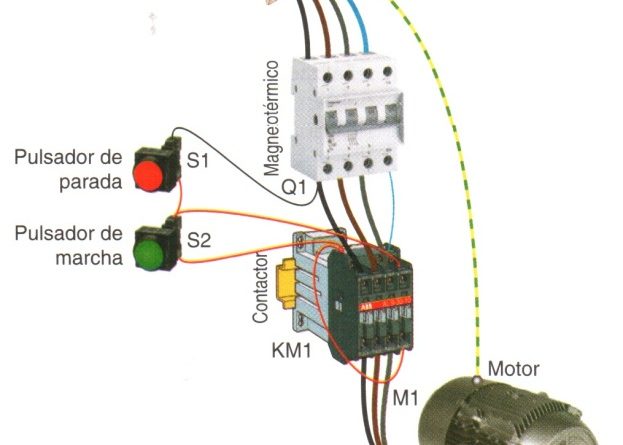
El motor eléctrico constituye la fuerza principal en el campo industrial, ya que este impulsa las máquinas eléctricas y los procesos productivos, así como las instalaciones eléctricas.
Todo el movimiento de maquinaria con motores eléctricos se debe a que estos son accionados por circuitos de control que pueden ser manipulados dependiendo de la necesidad de trabajo con que se quiera, pero en estos sistemas se involucran diferentes dispositivos de control que dan las órdenes de trabajo a las máquinas eléctricas.
Clasificación de Robots
Por la generación
Primera generación.
Son aquellos manipulados por controles, cuya función es limitada, sin percibir su alrededor, respondiendo los mismos a las direcciones que sus comandos le indica.
Segunda generación.
Esta generación se caracteriza porque los robots comienzan a percibir mayor información de su alrededor, pudiendo a su vez almacenar información del mismo.
Tercera Generación.
 Con esta generación la tecnología hace de las suyas, pues los robots inician con mayor rapidez la captación del entorno dada la inclusión de sensores.
Con esta generación la tecnología hace de las suyas, pues los robots inician con mayor rapidez la captación del entorno dada la inclusión de sensores.Cuarta generación.
Conforme a esta generación los robots no solo captan el entorno sino que además por medio de la aplicación de sensores permiten la comprensión del ambiente.
Quinta generación.
Estos son los que además de captar, comprender el entorno, pueden realizar respuestas, reaccionar ante las circunstancias y emitir incluso ciertos comandos de respuestas propias conforme topen con el ambiente.
Arquitectura de un robot
De acuerdo con la estructura de un sistema de control (entrada, control y salida) que hemos estudiado anteriormente, en un robot podemos distinguir los siguientes componentes:
- Los distintos tipos de sensores que hemos visto y que se encargan de suministrar los datos de entrada y / o de realimentación del sistema.
- La unidad de control que procesa la información que proporcionan los sensores y toma decisiones de acuerdo con dicha información. Por lo general se trata de la CPU (unidad central de proceso) de un ordenador. En la próxima unidad veremos cómo se programa el robot para darle órdenes.
- Los actuadores que son los elementos que ejecutan las órdenes de la unidad de control. Pueden ser eléctricos, mecánicos, hidráulicos o neumáticos.
Comentarios
Publicar un comentario